
Autonomous Driving and Intelligent Transport
Group Leader(s): Dr Andrew Bradley
Contact: abradley@brookes.ac.uk
About us
The Autonomous Driving and Intelligent Transport group develops state-of-the-art technologies to realise the potential offered by intelligent, connected and highly automated vehicles and transport systems.
Academics and researchers have expertise in many areas including autonomous vehicle perception and control systems, connected vehicle communications, smart city integration, ethical vehicles and transport strategy - enabling us to advise, research and consult on all aspects of the vehicles of the future.
The group is funded by Horizon 2020, and is proud to support OBU’s award-winning autonomous racing team, OBR Autonomous.

Related courses
- Artificial Intelligence (BSc (Hons) / MSci)
- Automotive Engineering with Electric Vehicles (MSc)
- Engineering (MPhil / PhD / Masters by Research / PhD by Published Work)
- Computer Science for Cyber Security (BSc (Hons))
- Computer Science (BSc (Hons))
- Computer Science for Cyber Security (MSc / PGDip / PGCert)
- Computing Science (MSc / PGDip / PGCert)
- Electro-Mechanical Engineering BEng (BEng (Hons))
- Motorsport Engineering (MSc)
- Motorsport Engineering (BEng (Hons) / MEng)
Research impact

The group works closely with local partners and stakeholders, and advises on the Future of Mobility in Oxfordshire with regular interaction with OxLEP. Our research develops technological advances which will significantly impact road safety, and is active in working with SMEs and larger enterprises to implement technology developed at OBU in road-going vehicles. The group has advised on the development of the legal framework for the adoption of Autonomous Vehicles on the UK’s road network.
The OBR Autonomous project seamlessly blends research with teaching, graduating world-class students with the experience required to be the next generation of autonomous vehicle engineers and software developers.
Leadership

Projects
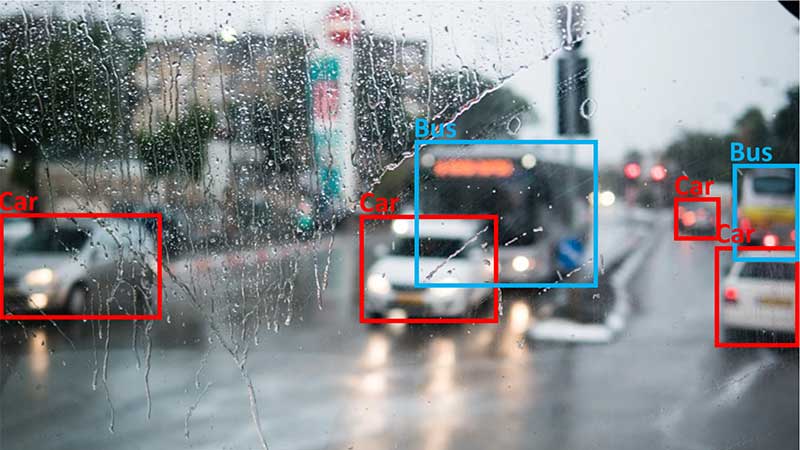
Autonomous vehicles ‘see’ the world around them via the perception system. Working closely with the Visual Artificial Intelligence Lab, we aim to enhance the ability of the autonomous vehicle to interpret the surrounding environment - with a particular focus on dealing with difficult conditions, adverse weather, and predicting the behaviour of other road users.
- Artificially Intelligent object detection
- LiDAR, camera and multi-modal perception
- Detection and prediction of road user behaviour
- V2X communications to enhance scene understanding
- Real-time weather augmentation (AI alteration of the weather within images)
- Robust, weatherproof object detection

Controlling the vehicle is of utmost performance, and testing autonomous vehicles is difficult, expensive, and inherently risky. Fusing OBU’s experience in vehicle dynamics with our computing expertise enables us to work on real-time vehicle control systems and develop simulations to facilitate virtual testing of autonomous driving systems - thus dramatically increasing the pace of development. We are experienced in:
- Vehicle dynamic modelling and simulation
- Hardware-in-Loop and Driver-in-Loop testing
- Real-time vehicle control strategies (including adverse weather)
- Augmented-Reality simulation
- Sensor modelling and validation.
Vehicle-to-Vehicle and Vehicle-to-Infrastructure communications present a huge opportunity for autonomous vehicles to interact with each other and the roadside infrastructure around them in ways human drivers can only dream of, thereby enabling truly smart road networks in the cities of the future. However, these opportunities require extensive research to ensure the communication of timely, useful, authenticated information in a secure manner. Particular areas of interest include:
- V2X communications
- Networking and Security
- Traffic modelling and information management
- Future road network and city design
- Smart-city integration
- Automated transport planning.

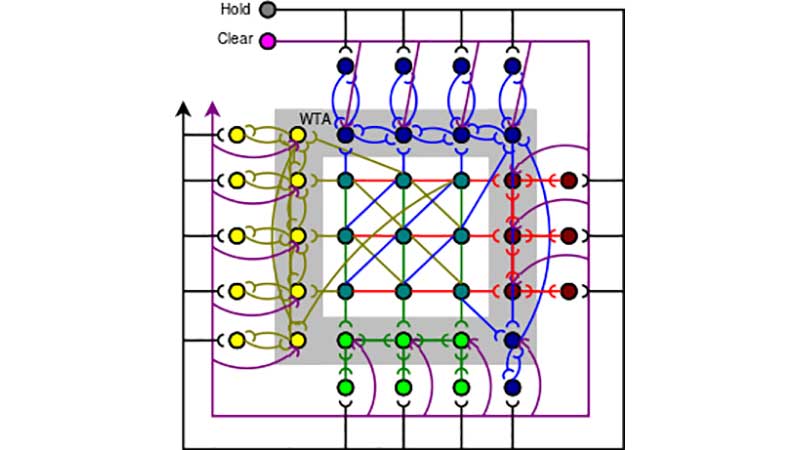
Autonomous vehicles need to be able to map out their environment, and / or accurately identify their location within this map. Our research tackles complex problems including:
- Map-based localisation
- Sensor fusion
- Simultaneous Localisation and Mapping (SLAM)
- Biologically-inspired SLAM
- Trajectory prediction, planning and optimisation.
Eventually, humans and autonomous vehicles will be operating in tandem with one another. Collaborating with the Cognitive Robotics Group and the Institute for Ethical AI, we are addressing:
- Interaction between vehicle and driver, pedestrians, and other vehicles
- Human driver awareness monitoring systems
- Smooth handover of control between human and autonomous driver
- Managing passenger expectations, and adjusting driving style to suit personal preferences
- Vehicle behaviour and actions in shared and social spaces
- How to interpret and recreate human gestures to signal road intentions (e.g. raising a hand to allow pedestrians to cross).


The Autonomous Driving and Intelligent Transport group is proud to support OBR Autonomous - Oxford Brookes’ multiple award-winning self-driving student racing team, and winners of the IMechE’s 2020 Formula Student: Artificial Intelligence competition (DDT class). With world-class workshops and access to test facilities, we work closely with the team upon:
- Real-world experimental testing
- Augmented-Reality testing
- Electric vehicle design and build
- Hardware-in-Loop testing
- Multi-modal sensor equipment